试了一下 是真的
版主: huangchong




Re: 试了一下 是真的
算了一下,没毛病
代码: 全选
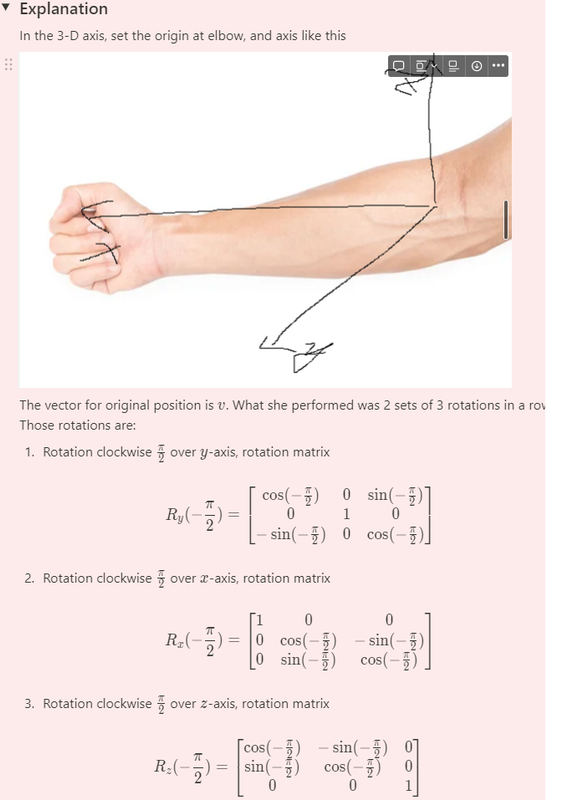
syms t
Rx = [1 0 0;0 cos(t) -sin(t);0 sin(t) cos(t)]
Ry = [cos(t) 0 sin(t);0 1 0; -sin(t) 0 cos(t)]
Rz = [cos(t) -sin(t) 0;sin(t) cos(t) 0; 0 0 1]
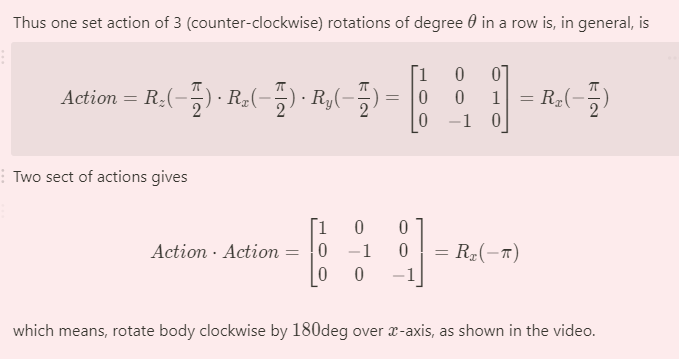
rotation = Rz * Rx * Ry
t = -pi / 2 % clockwise rotation at each step
action = subs(rotation)
total_actions = action * action
action_target = [1 0 0; 0 0 1;0 -1 0]
action_target == action


Re: 试了一下 是真的
from scipy.Rotation import rotation(ヅ) 写了: 2022年 12月 21日 12:25 算了一下,没毛病
代码: 全选
syms t Rx = [1 0 0;0 cos(t) -sin(t);0 sin(t) cos(t)] Ry = [cos(t) 0 sin(t);0 1 0; -sin(t) 0 cos(t)] Rz = [cos(t) -sin(t) 0;sin(t) cos(t) 0; 0 0 1] rotation = Rz * Rx * Ry t = -pi / 2 % clockwise rotation at each step action = subs(rotation) total_actions = action * action action_target = [1 0 0; 0 0 1;0 -1 0] action_target == action
Re: 试了一下 是真的
这个实验 即有生理学 又有数学(ヅ) 写了: 2022年 12月 21日 12:25 算了一下,没毛病
代码: 全选
syms t Rx = [1 0 0;0 cos(t) -sin(t);0 sin(t) cos(t)] Ry = [cos(t) 0 sin(t);0 1 0; -sin(t) 0 cos(t)] Rz = [cos(t) -sin(t) 0;sin(t) cos(t) 0; 0 0 1] rotation = Rz * Rx * Ry t = -pi / 2 % clockwise rotation at each step action = subs(rotation) total_actions = action * action action_target = [1 0 0; 0 0 1;0 -1 0] action_target == action