TheMatrix 写了: 2025年 10月 25日 09:09哦对,你还有另一方面的困惑,就是为什么二维的旋转是rv - 两个复数的乘法,而三维的旋转是qvq-1 - 三个数的乘法。
这个我觉得是数域的特殊性。二维数域(复数)和四维数域(quaternion)的特殊性。再往上就没有了,8维数域(应该)就没有这个性质了。再往上连数域都没有了。
所以你的困惑还是在于不知道它是怎么来的。你知道它怎么来的,就不会认为它们应该具有统一性了。我觉得。
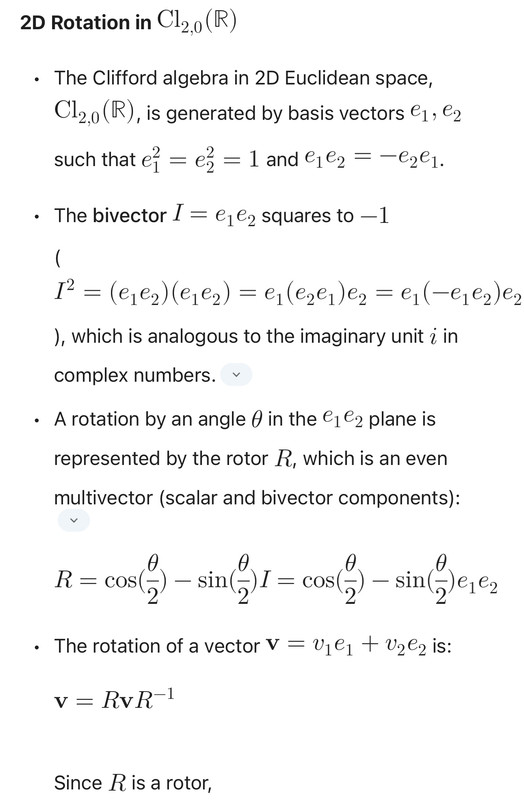
那么quaternion可以用于三维旋转的计算的方法是怎么来的呢?我觉得是从Clifford algebra里来的。本版以前讨论过Clifford algebra,但是并没有讨论到quaternion用于计算三维旋转的方法是怎么从Clifford algebra里导出的。
我也没有想清楚。我想大致的过程是这样:
quaternion H 同构于 Cl(3,0),三维空间生成的Clifford algebra,的偶数subalgebra。三维空间的基矢为 {e1,e2,e3},那么Cl(3,0)有下面的基矢:
{
1,
e1,e2,e3,
e1e2,e2e3,e3e1,
e1e2e3,
}
共8维,而偶subalgebra是
{
1,
e1e2,e2e3,e3e1,
}
共4维,这就是quaternion。由三维空间生成的Clifford algebra,它的由二维矢量构成的子空间,对三维空间本身,有一个旋转的作用。也就是如果q=e1e2,v=e3,那么qvq-1是v在三维空间的一个旋转。这里的乘法是Clifford algebra的乘法。这个是怎么来的呢?是因为一个二维Clifford algebra矢量等于两个一维矢量的乘法,而每一个作用在v上等于一个反射,两个反射合在一起等于一个旋转。比如 u=e1, v=e3,那么-uvu-1是v关于u的反射。
三维空间本身可以嵌入Clifford algebra Cl(3,0),也就是{e1,e2,e3,}这个由一维矢量构成的子空间。但是这个并不是quaternion的{i,j,k}子空间。从quaternion用于旋转的方法看,v可以嵌入quaternion,应该是嵌入{1,e1e2,e2e3,e3e1,}。所以这是两个不同的嵌入。这两个怎么统一我也没想清楚。